







၀၁၀၂၀၃၀၄၀၅


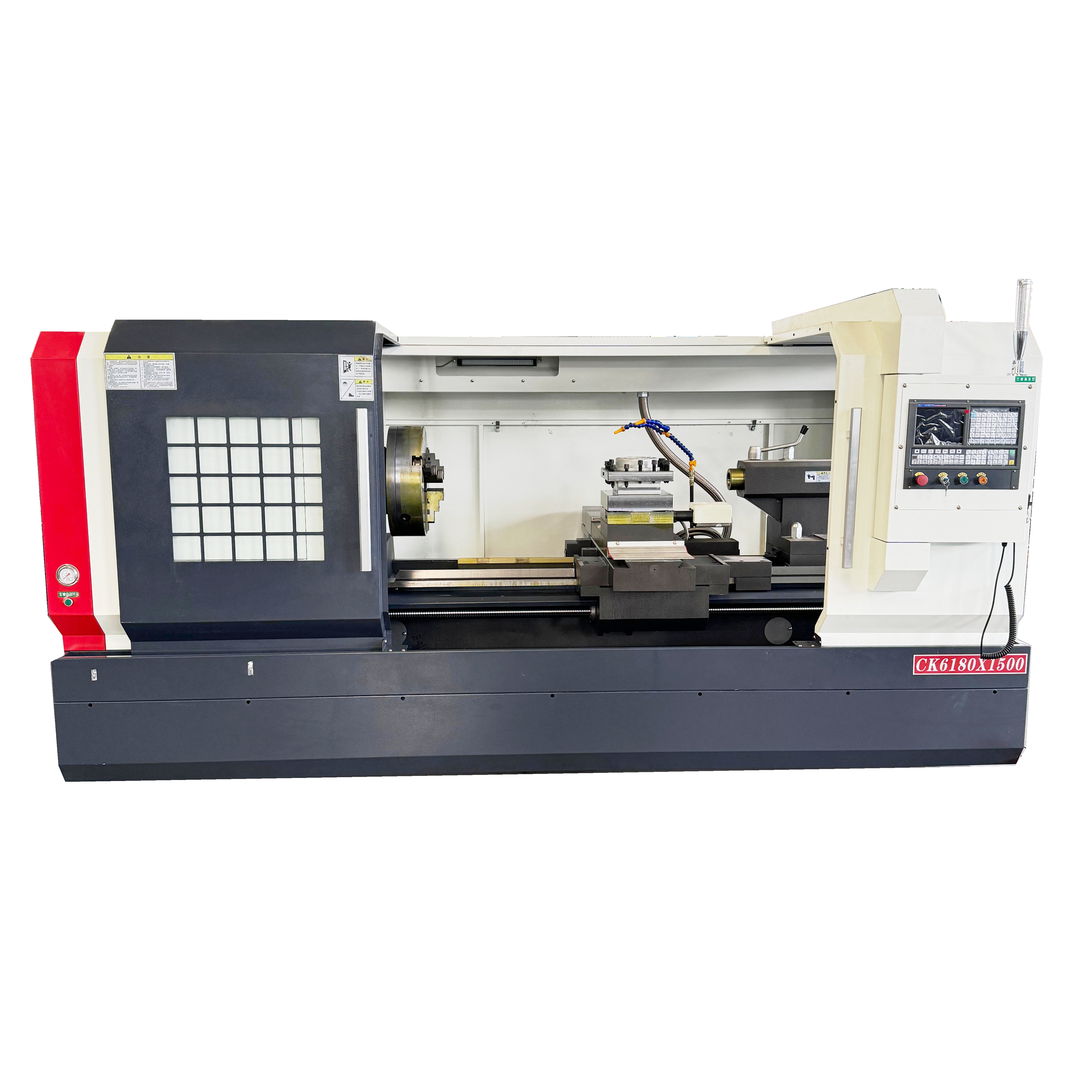
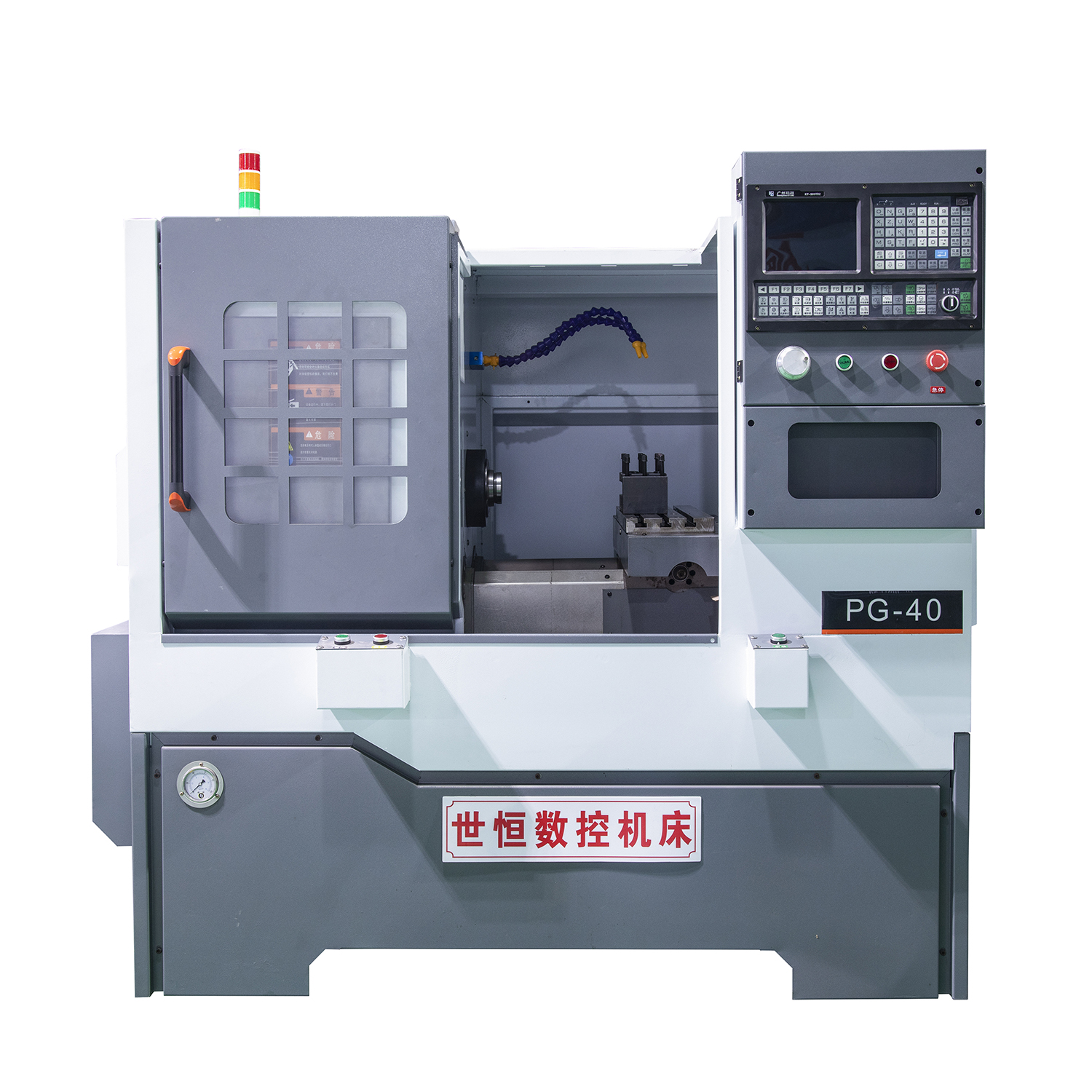
၅ ဝင်ရိုး ခုံစက် ကွန်ပျူတာ ဂဏန်းတွက်စနစ်ဖြင့် ထိန်းချုပ်ထားသော ကြိတ်စက်
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်
| စွမ်းရည် | |||||||||
| ကုတင်ပေါ်ရှိ အများဆုံးလှည့်နိုင်သော အချင်း | ၃၆၀ မီလီမီတာ | ||||||||
| တာယာပေါ်ရှိ အများဆုံးလှည့်နိုင်သော အချင်း | ၁၈၀ မီလီမီတာ | ||||||||
| အများဆုံး စက်ယန္တရားအချင်း | ၃၆၀ မီလီမီတာ | ||||||||
| အများဆုံး လုပ်ဆောင်ချိန် | ၄၀၀ မီလီမီတာ | ||||||||
| စပိုက်လ်ရှေ့အပေါက်၏ တ্যান্য | ၄၄° | ||||||||
| Tool post မှ spindle center အထိ အမြင့် | ၄၀၀ မီလီမီတာ | ||||||||
| ဝင်ရိုး၏ လေဖြတ်ခြင်း | |||||||||
| X ဝင်ရိုး လေဖြတ်ခြင်း | ၆၈၀ မီလီမီတာ | ||||||||
| Y ဝင်ရိုး လေဖြတ်ခြင်း | ၃၂၀ မီလီမီတာ | ||||||||
| Z ဝင်ရိုး လေဖြတ်ခြင်း | ၂၂၀ မီလီမီတာ | ||||||||
| စပင်ဒယ်လ် | |||||||||
| စပင်းလ်မြန်နှုန်း | ၁-၆၀၀၀RPM | ||||||||
| spindle 360° indexing အမှား | ၀.၀၁၈° | ||||||||
| ပင်စည်နှာခေါင်း | A2-5 | ||||||||
| အပေါက်အချင်း | ၄၆ မီလီမီတာ | ||||||||
| စပင်းလ်ပါဝါ | ၇.၅ ကီလိုဝပ် | ||||||||
| တိကျမှု | |||||||||
| စက်ပြင်ခြင်း တိကျမှု | |||||||||
| ထပ်ခါတလဲလဲ နေရာယူမှု တိကျမှု | |||||||||
| ဓားအနား | |||||||||
| ကိရိယာပို့စ်ပုံစံ | ၆ ဘူတာဘတ်စ်ကား servo turret | ||||||||
| ထောင့်မှန်စတုဂံပုံ လက်ကိုင်၏ အမြင့် | ၂၀ မီလီမီတာ | ||||||||
| တူးဖော်ဘားလက်ကိုင်၏ အချင်း | ၂၀ မီလီမီတာ | ||||||||
| အစာကျွေးခြင်း | |||||||||
| X spindle အမြန်ကျွေးခြင်း | ၂၀ မီတာ/မိနစ် | ||||||||
| Y spindle အမြန်ကျွေးခြင်း | ၁၈ မီတာ/မိနစ် | ||||||||
| Z spindle အမြန်ကျွေးခြင်း | ၂၄ မီတာ/မိနစ် | ||||||||
| မော်တာ | |||||||||
| စပင်းမော်တာ | ၇.၅ ကီလိုဝပ် | ||||||||
| ဟိုက်ဒရောလစ်စုပ်စက်မော်တာ | ၀.၇၅ ကီလိုဝပ် | ||||||||
| ဖြတ်တောက်ခြင်းအရည်စုပ်စက်မော်တာ | ၀.၁၂ ကီလိုဝပ် | ||||||||
| လျှပ်စစ်ဓာတ်အားထောက်ပံ့မှု | ၃၈၀ ဗို့ | ||||||||
| စက်ပမာဏ | |||||||||
| ကြမ်းပြင်ဧရိယာ (စံသတ်မှတ်ချက်) X3 | ၁၇၅၀ x ၁၄၀၀ x ၁၈၅၀ မီလီမီတာ x မီလီမီတာ | ||||||||
| အလေးချိန် | ၁၈၀၀ ကီလိုဂရမ် | ||||||||
ကုန်ပစ္စည်းအကြောင်းအရာ

- ၁။ CNC ထိန်းချုပ်မှုစနစ်
စက်သည် Syntec ဘတ်စ်ကားထိန်းချုပ်မှုစနစ်ကို အသုံးပြုထားပြီး သတ္တုပြုပြင်ခြင်း၏ အလွန်ရှုပ်ထွေးသောလုပ်ငန်းကို လုပ်ဆောင်နိုင်သည်။ ၎င်းသည် ဖြတ်တောက်ခြင်းလုပ်ငန်းစဉ်ကို တိကျစွာထိန်းချုပ်နိုင်စေပါသည်။ ဤစနစ်သည် အဆင့်မြင့်ကွန်ပျူတာနည်းပညာကို စက်ပိုင်းဆိုင်ရာလုပ်ဆောင်မှုများနှင့် ပေါင်းစပ်ထားပြီး ထူးခြားသောတိကျမှုနှင့် ထိရောက်မှုကို ပေးစွမ်းသည်။ CNC ထိန်းချုပ်မှုယူနစ်တွင် အော်ပရေတာများအား ရှုပ်ထွေးသော ပရိုဂရမ်းမင်းအစီအစဥ်များကို ထည့်သွင်းစီမံခန့်ခွဲနိုင်စေမည့် အသုံးပြုရလွယ်ကူသော interface ပါရှိသည်။ ၎င်းတွင် ရှုပ်ထွေးသော 2D နှင့် 3D စက်ပိုင်းဆိုင်ရာလုပ်ဆောင်မှုများကို လုပ်ဆောင်နိုင်သော ခိုင်မာသော software suite ပါရှိသည်။ အချိန်နှင့်တပြေးညီ စောင့်ကြည့်ခြင်းနှင့် လိုက်လျောညီထွေဖြစ်အောင် ထိန်းချုပ်မှုစွမ်းရည်များဖြင့် စနစ်သည် စက်ကို ချောမွေ့စွာလည်ပတ်စေပြီး အရည်အသွေးမြင့်ဖြတ်တောက်မှုများနှင့် ထုတ်လုပ်မှုတွင် ထူးခြားသော တသမတ်တည်းရှိမှုကို ပေးစွမ်းနိုင်ကြောင်း သေချာစေသည်။
- ၂။ Collet နှင့် tailstock ဖြင့် ဟိုက်ဒရောလစ် Clamping
ဟိုက်ဒရောလစ်ညှပ်ခြင်းသည် စက်ယန္တရားလည်ပတ်နေစဉ်အတွင်း workpieces များကို နေရာတွင် ခိုင်မြဲစွာ ခိုင်မြဲစွာ ထားရှိရန်အတွက် အသုံးပြုသည့် ခေတ်မီယန္တရားတစ်ခုဖြစ်သည်။ ဤစနစ်တွင် workpiece ကို လုံခြုံစွာ ဆုပ်ကိုင်ထားသည့် တိကျစွာပြုလုပ်ထားသော ညှပ်တစ်ခုဖြစ်သည့် collet ကို အသုံးပြုသည်။ collet ကို ဟိုက်ဒရောလစ်ဖြင့် အသက်သွင်းပြီး workpiece ကို မပျက်စီးစေဘဲ ခိုင်မာပြီး တသမတ်တည်း ဆုပ်ကိုင်ထားနိုင်စေပါသည်။ ထို့အပြင်၊ လျှောကျသော အထောက်အပံ့ဖွဲ့စည်းပုံဖြစ်သည့် tailstock ကိုလည်း ဟိုက်ဒရောလစ်ဖြင့် ထိန်းချုပ်ထားသည်။ ၎င်းကို workpieces များ၏ အရှည်အမျိုးမျိုးနှင့် လိုက်လျောညီထွေဖြစ်အောင် ချိန်ညှိနိုင်ပြီး ဖြတ်တောက်ခြင်းလုပ်ငန်းစဉ်အတွင်း တည်ငြိမ်မှုအတွက် အပိုထောက်ပံ့မှုပေးစွမ်းသောကြောင့် တိကျမှုနှင့် တိကျမှုကို သေချာစေသည်။ 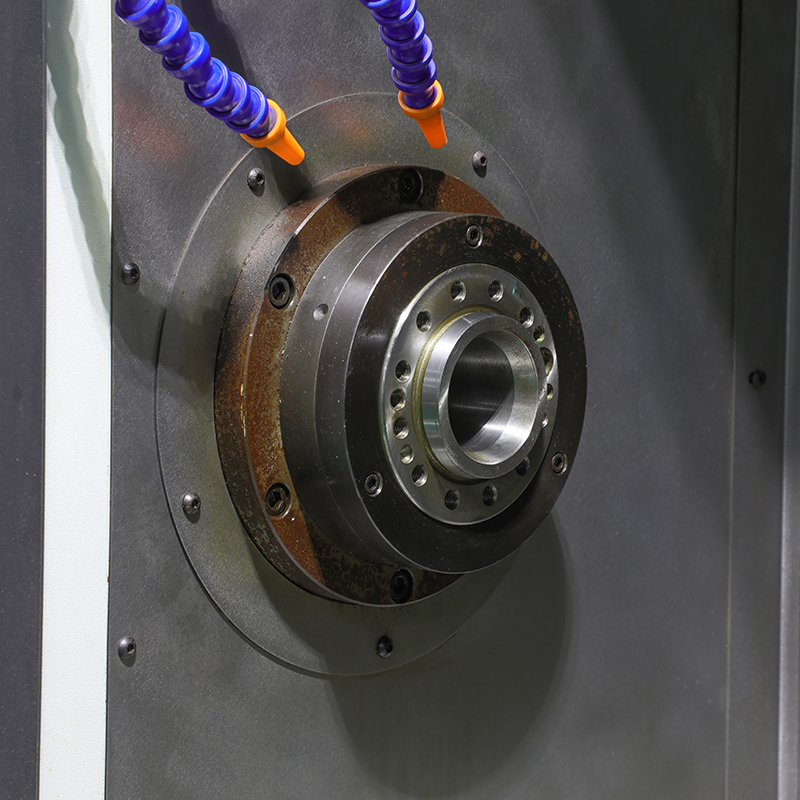
၃.၄+၄ Y ဝင်ရိုး ပါဝါဦးခေါင်းနှင့် ၆ စခန်း Servo Tool Turret
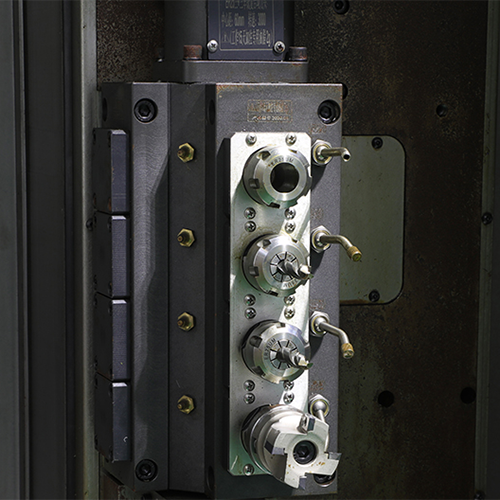

၄+၄ Y ဝင်ရိုး ပါဝါခေါင်းသည် စက်၏ စွယ်စုံရမှုနှင့် ထုတ်လုပ်နိုင်စွမ်းကို မြှင့်တင်ပေးသည့် ထူးခြားသော အင်္ဂါရပ်တစ်ခုဖြစ်သည်။ ဤဒီဇိုင်းတွင် သီးခြား Y-ဝင်ရိုး ဆလိုက်နှစ်ခု ပါဝင်ပြီး တစ်ခုစီတွင် ဖြတ်တောက်သည့် စခန်း ရှစ်ခု တပ်ဆင်ထားသည်။ ၎င်းသည် ရေဒီယယ်နှင့် ဝင်ရိုး ဦးတည်ချက် နှစ်မျိုးလုံး၏ ကြိတ်ခွဲခြင်း လုပ်ဆောင်ချက်ကို ခွင့်ပြုပေးပြီး ရှုပ်ထွေးသော လုပ်ဆောင်ချက်များကို လုပ်ဆောင်နိုင်စွမ်းကို ထိရောက်စွာ မြှင့်တင်ပေးသည်။ ၆ စခန်း servo tool turret သည် စက်၏ ထိရောက်မှုနှင့် ပြောင်းလွယ်ပြင်လွယ်မှုကို မြှင့်တင်ပေးသည့် အဓိက အစိတ်အပိုင်းတစ်ခုဖြစ်သည်။ ဤ turret တွင် ဖြတ်တောက်ခြင်း လုပ်ဆောင်ချက် အမျိုးမျိုးအတွက် မတူညီသော ကိရိယာတစ်ခုကို ကိုင်ဆောင်နိုင်သည့် ကိရိယာ station ခြောက်ခု တပ်ဆင်ထားသည်။
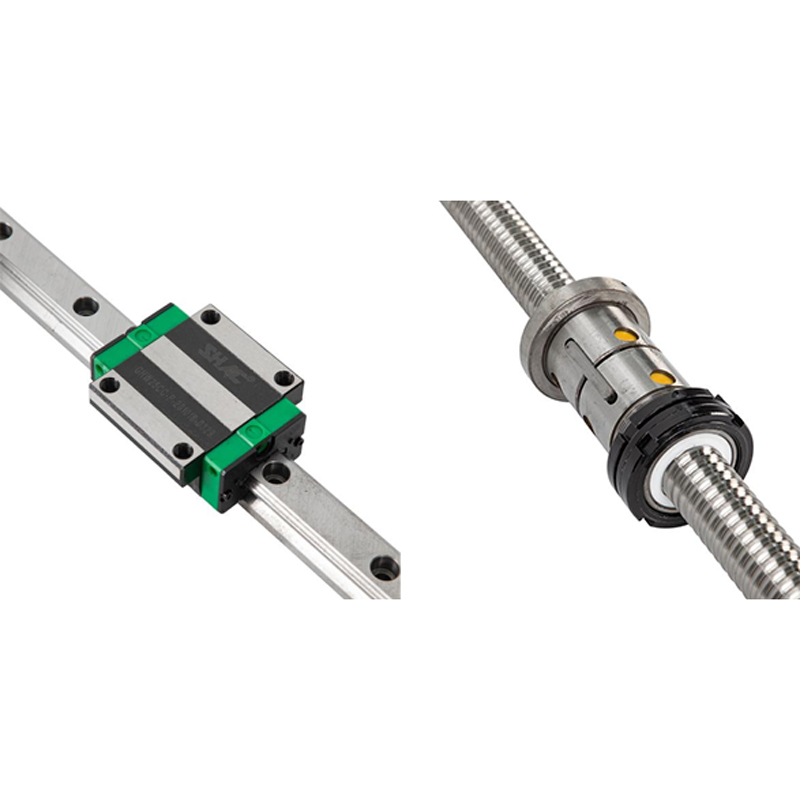
- ၄။ ဝက်အူခဲနှင့် Linear Guide Railဝက်အူကြိုးနှင့် တွဲဖက်လုပ်ဆောင်သော linear guide rail စနစ်သည် စက်၏ ရွေ့လျားနေသော အစိတ်အပိုင်းများအတွက် တည်ငြိမ်ပြီး တိကျသော အထောက်အပံ့ကို ပေးစွမ်းသည်။ ဤ rail များကို အရည်အသွေးမြင့်ပစ္စည်းများဖြင့် ပြုလုပ်ထားပြီး စက်ယန္တရားလည်ပတ်မှုများအတွင်း ကြုံတွေ့ရသော လေးလံသောဝန်များနှင့် မြင့်မားသောအမြန်နှုန်းများအောက်တွင်ပင် ပွတ်တိုက်မှုကို လျှော့ချရန်နှင့် ပွန်းစားမှုကို ခံနိုင်ရည်ရှိစေရန် ဒီဇိုင်းထုတ်ထားသည်။ လမ်းညွှန်များတွင် ပွတ်တိုက်မှုနည်းပြီး မာကျောမှုမြင့်မားသော ပြန်လည်လည်ပတ်နေသော ဘောလုံး bearing များ တပ်ဆင်ထားလေ့ရှိပြီး စက်အား တင်းကျပ်သော ခံနိုင်ရည်ကို ထိန်းသိမ်းနိုင်ပြီး သာလွန်ကောင်းမွန်သော မျက်နှာပြင်ပြီးစီးမှုများကို ပေးစွမ်းနိုင်သည်။
- ၅။ လျှပ်စစ်စပင်း
လျှပ်စစ် spindle သည် စက်၏ ဖြတ်တောက်နိုင်စွမ်း၏ အဓိကအချက်ဖြစ်ပြီး စက်ပိုင်းဆိုင်ရာ လုပ်ဆောင်ချက်အမျိုးမျိုးကို လုပ်ဆောင်ရန် လိုအပ်သော စွမ်းအားနှင့် တိကျမှုကို ပေးစွမ်းသည်။ ၎င်းသည် စက်ကိရိယာပေါ်တွင် တိုက်ရိုက်တပ်ဆင်ထားသော မြန်နှုန်းမြင့် မော်တာတစ်ခုဖြစ်ပြီး ဖြတ်တောက်သည့်ကိရိယာကို လှည့်ကာ workpiece မှ ပစ္စည်းများကို ဖယ်ရှားပေးသည်။ လျှပ်စစ် spindle ကို မြန်နှုန်း၊ စွမ်းအားနှင့် တိကျမှုကို အဓိကထား၍ မြင့်မားသောစွမ်းဆောင်ရည်အတွက် ဒီဇိုင်းထုတ်ထားသည်။ 